Congratulations to Dr. James Liao and colleagues for the paper "Convergence of undulatory swimming kinematics across a diversity of fishes" published in the Proceedings of the National Academy of Sciences (PNAS). The team includes past Liao Lab post doc Dr. Otar Akayeti, now faculty in Wales, as well as Liao's colleagues at Harvard, who looked at the swimming kinematics of 44 fishes and challenge assumptions on previous swimming locomotion.
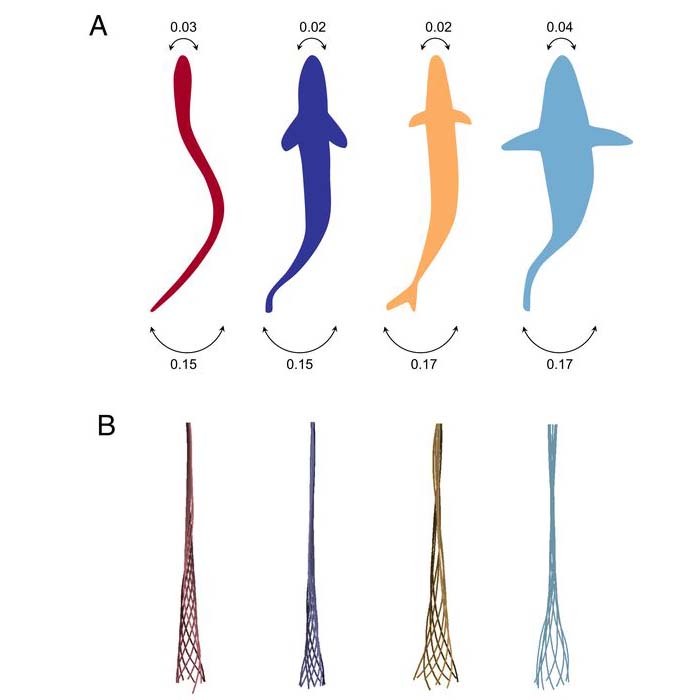
Fishes exhibit an astounding diversity of locomotor behaviors from classic swimming with their body and fins to jumping, flying, walking, and burrowing. Fishes that use their body and caudal fin (BCF) during undulatory swimming have been traditionally divided into modes based on the length of the propulsive body wave and the ratio of head:tail oscillation amplitude: anguilliform, subcarangiform, carangiform, and thunniform. This classification was first proposed based on key morphological traits, such as body stiffness and elongation, to group fishes based on their expected swimming mechanics. Here, we present a comparative study of 44 diverse species quantifying the kinematics and morphology of BCF-swimming fishes. Our results reveal that most species we studied share similar oscillation amplitude during steady locomotion that can be modeled using a second-degree order polynomial. The length of the propulsive body wave was shorter for species classified as anguilliform and longer for those classified as thunniform, although substantial variability existed both within and among species. Moreover, there was no decrease in head:tail amplitude from the anguilliform to thunniform mode of locomotion as we expected from the traditional classification. While the expected swimming modes correlated with morphological traits, they did not accurately represent the kinematics of BCF locomotion. These results indicate that even fish species differing as substantially in morphology as tuna and eel exhibit statistically similar two-dimensional midline kinematics and point toward unifying locomotor hydrodynamic mechanisms that can serve as the basis for understanding aquatic locomotion and controlling biomimetic aquatic robots.